ICCD系列伺服驅動器為標準化直流伺服驅動器。伺服驅動器的總線協議及運動模式均參照CANopen標準總線協議設計。
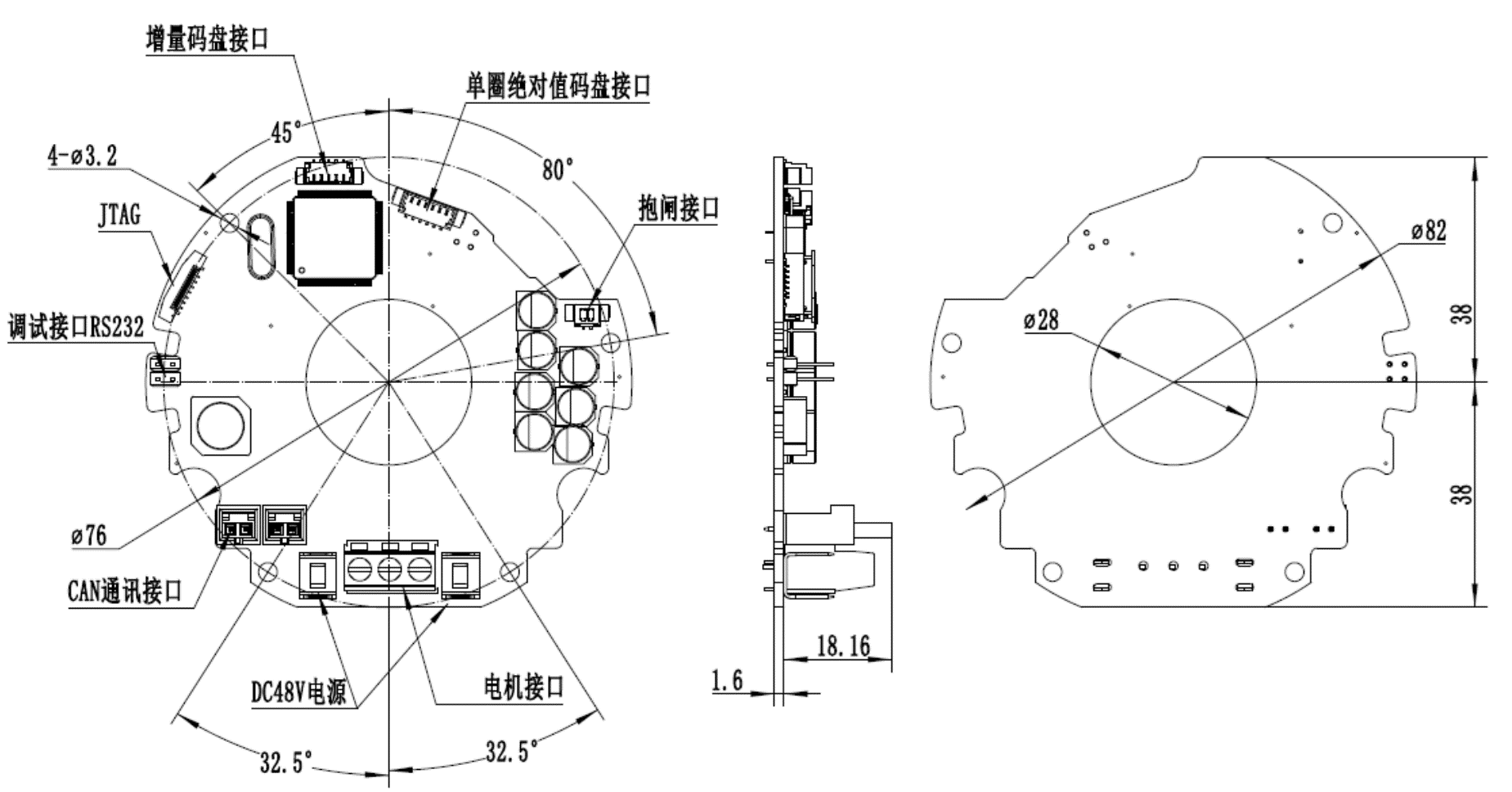
ICCD系列伺服驅動器專門針對機器人關節及一體化電機驅動系統設計。其支持雙碼盤,可在轉動軸的基礎上添加輸出軸編碼器。中空的設計可實現輸出軸的放置和線纜的通過,能最大成都保證連接線纜受到最小的牽拉力。
ICCD系列伺服驅動器,單圈絕對位置(輸出軸)采集精度可達到0.1°,速度采集頻率可達到10ms,電流采集精度可達到額定功率1‰。滿足機器人關節對位置、速度和力矩控制精度。
廣泛應用于各種協作機器人關節,排爆復合機器人,雙臂協作系統,自動加油機系統等應用場景。